

|
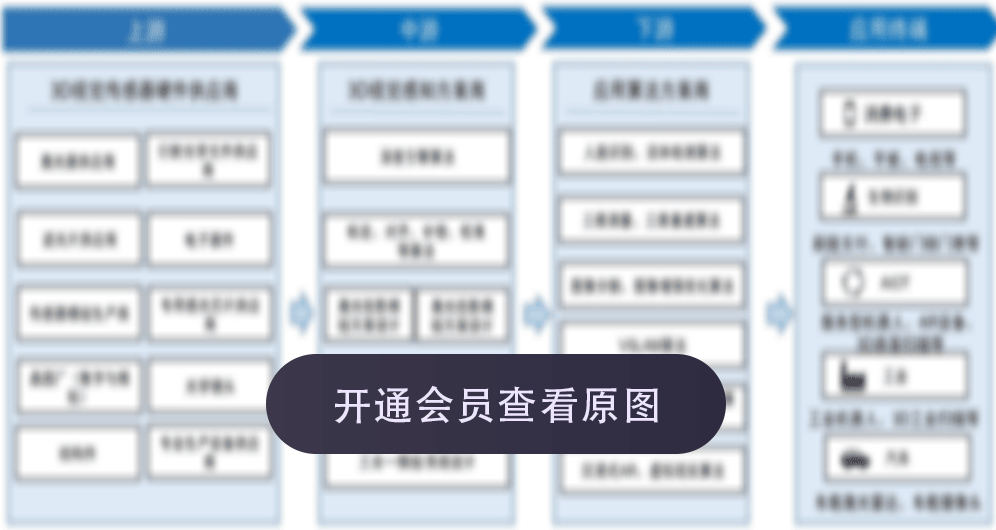
特斯拉人形机器人产业链价值量分布
分享
+
下载
+
数据来源:国金证券研究所
最近更新: 2026-01-14
补充说明:1、E表示预测数据;2、*表示估计数据;
数据描述
涉及多学科交叉,灵巧手具备较高壁垒。灵巧手涉及仿生结构、驱动、传动、感知、复合/智能材料、建模与控制等多方面综合能力把控。综合性能上,灵巧手的难点在于高灵巧性、高自由度与低驱动数低重量小体积之间的权衡;商业化落地上,存在性能和成本之间取得合理平衡的困难。
2024年10月和2025年11月,特斯拉公开展示了GEN2.5的灵巧手模型,预示GEN3的变化方向。预计GEN3灵巧手相比于GEN2的主要变化在于:
手部增加了自由度,单手自由度数量将从原本的11个提升到22个;驱动器装载在了手腕部位,采用了PEEK保持架等,腱绳长度提升;手掌触觉传感器面积增加,由原本的指尖传感器方案升级至覆盖全手的方案;可完成复杂动态任务,比如接住飞行网球等。
灵巧手企业的迭代能力决定其长期竞争力。当前美国在机器人灵巧手技术上处于领先地位,特别是在人工智能、传感器融合以及仿生技术领域有显著优势。灵巧手核心技术指标包括自由度、抓握力等,自由度角度看,海外特斯拉、Shadow Hand、SCHUNK和ILDA已经将DOF自由度做到20个以上,国内青龙灵巧手自由度做到19个,处于国内较为领先地位。抓握力角度看,海外的QBhand和国内的星动纪元较为领先,抓握力分别达到62N和80N。国内市场的公司、因时机器人、傲意、腾讯RoboticsX实验室等企业也在积极布局。国内灵巧手目前技术落后于海外,但是迭代效率上领先,长期看,灵巧手及核心供应链将由国内公司主导。