

|
2024年9月-2025年8年中国乘用车城市NOA标配量及标配率
分享
+
下载
+
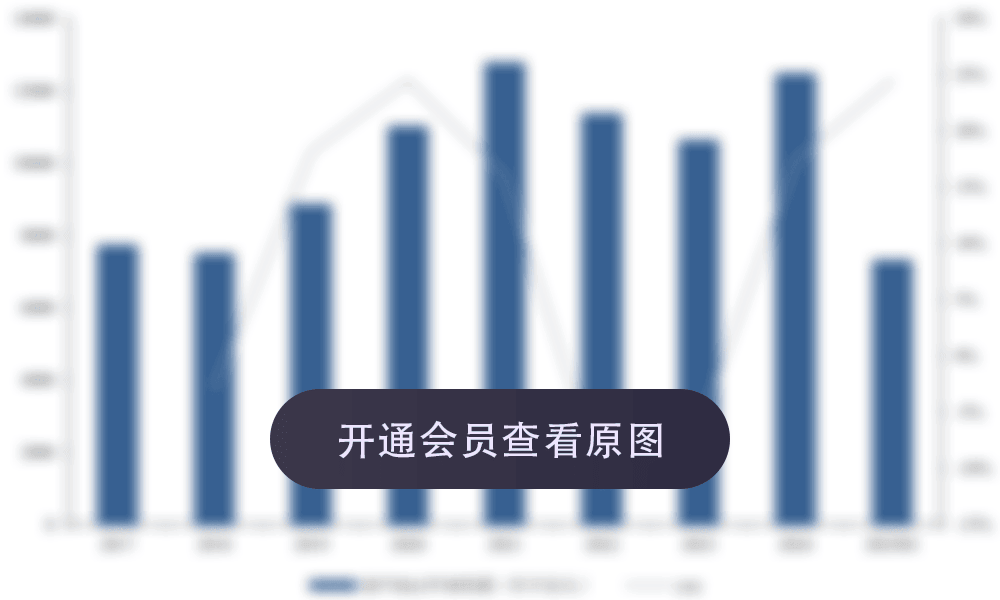
数据来源:佐思汽研,广发证券发展研究中心
最近更新: 2026-01-05
补充说明:1、E表示预测数据;2、*表示估计数据;
数据描述
截至2025年8月,国内城市NOA装配量(标配)达8.1万辆,同比增长183.4%,装配率(标配)4.1%,较去年同期增长2.6个百分点。
从产品形态和技术路线来看,自动驾驶汽车本质上就是将人从A点运输至到B点的机器人,因此应用于智驾领域的主控芯片亦可运用于人形机器人领域。
(1)感知层:二者都依赖激光雷达、摄像头、毫米波雷达、超声波传感器、惯性测量单元(IMU)等硬件实现环境建模。激光雷达可以为机器人规划室内导航路径、避开动态障碍提供精准空间信息;摄像头识别操作对象、面部表情、手势指令等,实现人机交互与环境理解;IMU实时监测加速度与角速度,助力机器人运动时保持平衡、精准执行动作。
(2)决策层:两者均通过深度学习、强化学习、神经网络等人工智能技术处理信息,并实施决策。路径规划是典型应用场景。自动驾驶汽车需要在车道、信号灯、其他车流等约束条件下规划行驶路径,机器人亦需要在规避障碍物等其他所规定的约束条件下,通过算法输出一条轨迹线作为行走的路径。
(3)控制层:两者均需将决策转换为物理动作。无论是高精度电机控制、伺服系统、运动控制算法等核心技术均能够实现复用。智驾汽车需要控制车辆的转向、加速,而机器人需要控制机械臂的关节运动。
在技术架构以及核心算法都存在较多重合领域的情况下,智驾芯片是可以被复用在机器人上的。目前诸多芯片厂商如黑芝麻智能、地平线机器人以及英伟达等已开始将自研发的智驾芯片置于IOT或是机器人之上。