

|
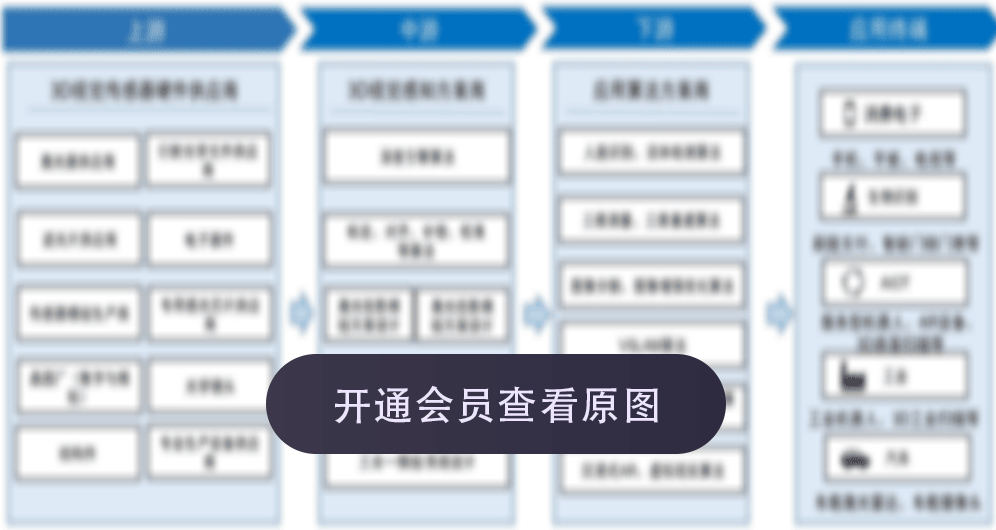
英伟达生态链企业——具身智能发展
分享
+
下载
+
数据来源:各公司官网,中信建投证券
最近更新: 2025-12-30
补充说明:1、E表示预测数据;2、*表示估计数据;
数据描述
此数据合成(如物理仿真、生成式A I驱动)与增强技术成突破关键;当前发展面临数据匮乏、泛化能力 不足 、Sim2Real鸿沟等瓶颈,而算法模型迭代是核心驱动力,以DeepSeek为代表的模型通过强化认知推理、世界 建模与生态协同,为突破泛化弱、实时性差等瓶颈提供新范式,未来算法与数据双向驱动或推动具身智能 在工 业、家庭等多领域规模化落地。
Model-based路线是经典的运动控制方法,通过精确的动力学和运动学模型,结合牛顿-欧拉方程等物理定律构建机器人各关节力学特性的数学模型。逆动力学控制可求解动力学方程以计算关节力矩,实现 高动 态运动,像工业机械臂在高精度装配任务中,就能凭借逆动力学控制精准完成复杂动作。模型预测控制则 实时 优化未来时间窗口内的运动轨迹,以适应动态环境,常用于移动机器人的路径规划。零力矩点主要应用于 双足 步行机器人,通过调整质心轨迹来维持平衡,本田的ASIMO机器人便借助该技术实现了稳定的双足行走。这 类基于模型的控制路线理论基础扎实,在对精度和动态性能要求极高的场景中表现出色,如航天设备组装 、精 密仪器制造等。但由于实际机器人运行环境复杂,模型难以做到与现实完全匹配,存在模型误差;且计算过 程复 杂,对硬件实时计算能力要求高,限制了其在资源受限场景中的应用。如乐聚机器人,其以产业应用为导 向, 目前主要采用model base的技术路线,实现了产品的批量化生产,每个行为具备可解释性。