

|
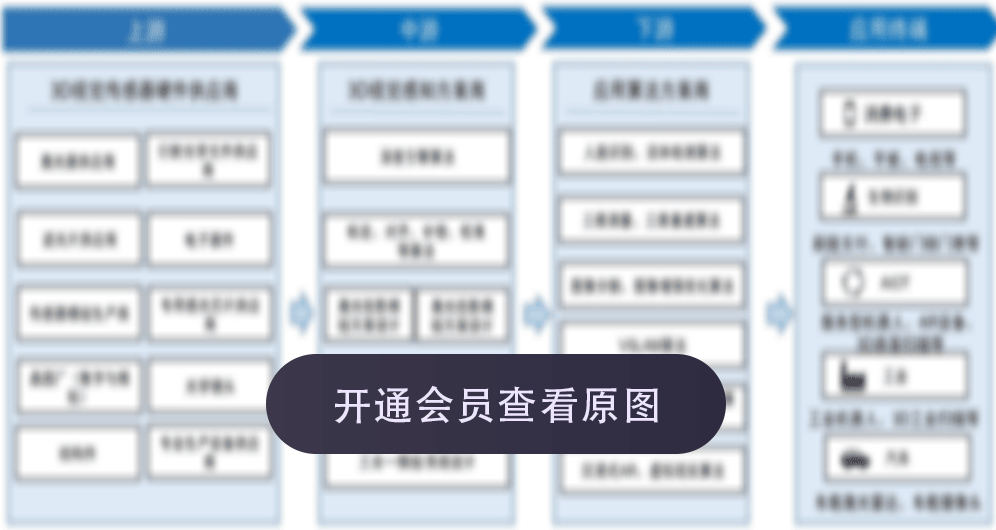
智能汽车产业链全景
分享
+
下载
+
数据来源:爱建证券研究所,Wind
最近更新: 2025-12-31
补充说明:1、E表示预测数据;2、*表示估计数据;
数据描述
1)分布式是传统阶段方案,每个功能模块(如发动机控制、车窗升降等)配备独立电子控制单元(ECU),通过CAN/LIN总线通信。其局限在于ECU数量庞大(高端车超100个),线束复杂(总长度超5km),软硬件耦合度高,功能升级困难;
2)域集中式是当前主流,按功能域集成各独立ECU,形成域控制器,如智驾域、座舱域、车身域等。智驾域控制器可以处理摄像头、雷达数据,运行自动驾驶算法,座舱域控制器将集成仪表盘、中控屏、语音交互等功能;
3)中央集中式是未来趋势,以1-2个高算力中央计算平台(HPC)为核心,搭配区域控制器(ZCU)实现就近接入。其价值在于硬件资源池化、软件全栈解耦,支持高阶自动驾驶与个性化功能迭代。